Towards Domain Independence for Learning-Based Monocular Depth Estimation for Drones UZH Robotics and Perception Group 3:37 7 years ago 1 887 Скачать Далее
Towards Domain Independence for Learning-based Monocular Depth Estimation ISARLab_UNIPG 3:35 7 years ago 85 Скачать Далее
Why should you use something else except monocular depth estimation Sid1057 0:11 3 years ago 13 654 Скачать Далее
Depth estimation from monocolor video camera on a Mavic Pro (front view of a 360° camera) RoblabWHGe 0:28 5 years ago 374 Скачать Далее
Obstacle Avoidance of a UAV Using Fast Monocular Depth Estimation for a Wide Stereo Camera ARRL 3:57 2 weeks ago 182 Скачать Далее
Monocular Depth Estimation with MiDaS Neural Networks Nicolai Nielsen 21:37 2 years ago 33 663 Скачать Далее
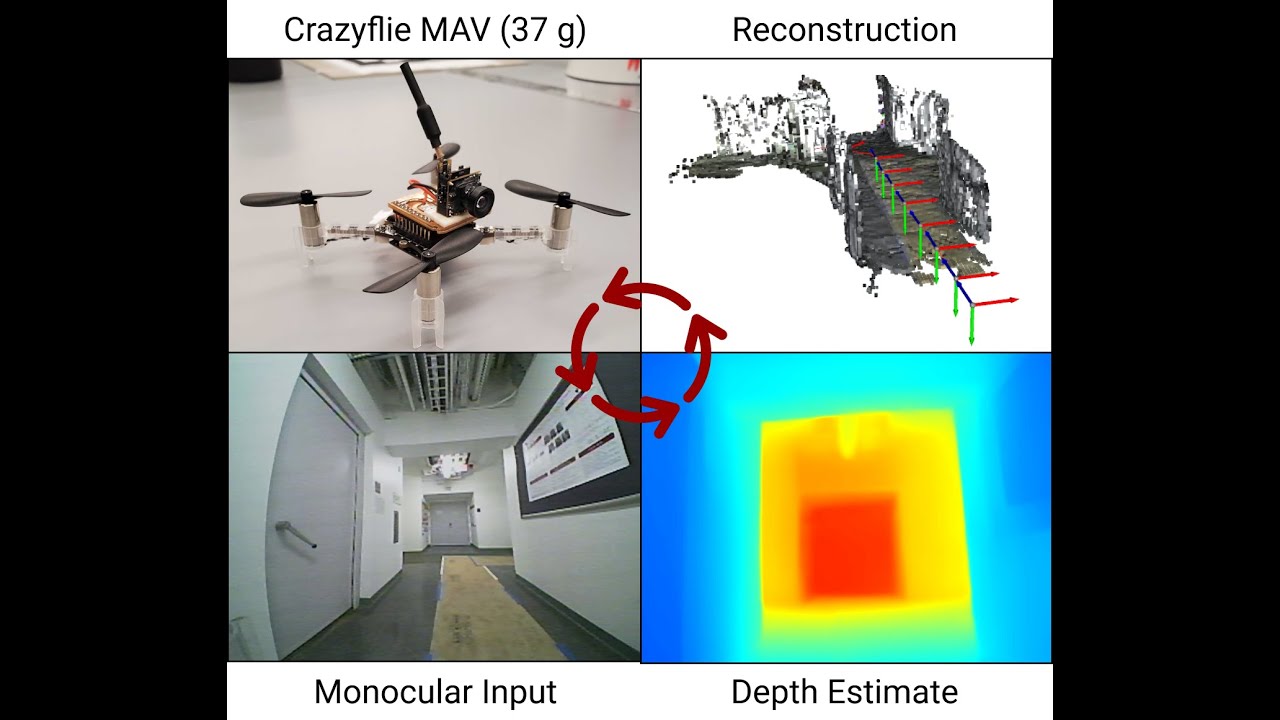
(Preview) MonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction Intelligent Robot Motion Lab 8:23 9 months ago 2 370 Скачать Далее
Vladlen Koltun: Towards machines that see in the real world (June 2020) ISL and Collaborators 35:06 4 years ago 1 319 Скачать Далее
Diana Wofk—Fast and energy-efficient monocular depth estimation on embedded systems MIT.nano 34:24 3 years ago 1 892 Скачать Далее
[IROS 2018] Towards real-time unsupervised monocular depth estimation on CPU Computer Vision and Embedded Systems 1:01 6 years ago 3 926 Скачать Далее
The first experiment of Monocular Depth Estimation through deep learning over a quadruped robot. Peiman Naseradinmousavi 0:12 2 months ago 90 Скачать Далее
Boosting Monocular Depth Estimation to High Resolution (CVPR 2021) Yağız Aksoy - Computational Photography Lab @ SFU 4:51 3 years ago 29 064 Скачать Далее